Abstract
Accurate uncertainty estimation for inertial odometry is the foundation to achieve optimal fusion in Inertial odometry (IO) using strap-down inertial measurement units (IMUs) is critical in many robotic applications where precise orientation and position tracking are essential. Prior kinematic motion model-based IO methods often use a simplified linearized IMU noise model and thus usually encounter difficulties in modeling non-deterministic errors arising from environmental disturbances and mechanical defects. In contrast, data-driven IO methods struggle to accurately model the sensor motions, often leading to generalizability and interoperability issues. To address these challenges, we present AirIMU, a hybrid approach to estimate the uncertainty, especially the non-deterministic errors, by data-driven methods and increase the generalization abilities using model-based methods. We demonstrate the adaptability of AirIMU using a full spectrum of IMUs, from low-cost automotive grades to high-end navigation grades. We also validate its effectiveness on various platforms, including hand-held devices, vehicles, and a helicopter that covers a trajectory of 262 kilometers. In the ablation study, we validate the effectiveness of our learned uncertainty in an IMU-GPS pose graph optimization experiment, achieving a 31.6\% improvement in accuracy. Experiments demonstrate that jointly training the IMU noise correction and uncertainty estimation synergistically benefits both tasks.
Method

Experiments

IMU-Centric Graph Optimization on EuRoC

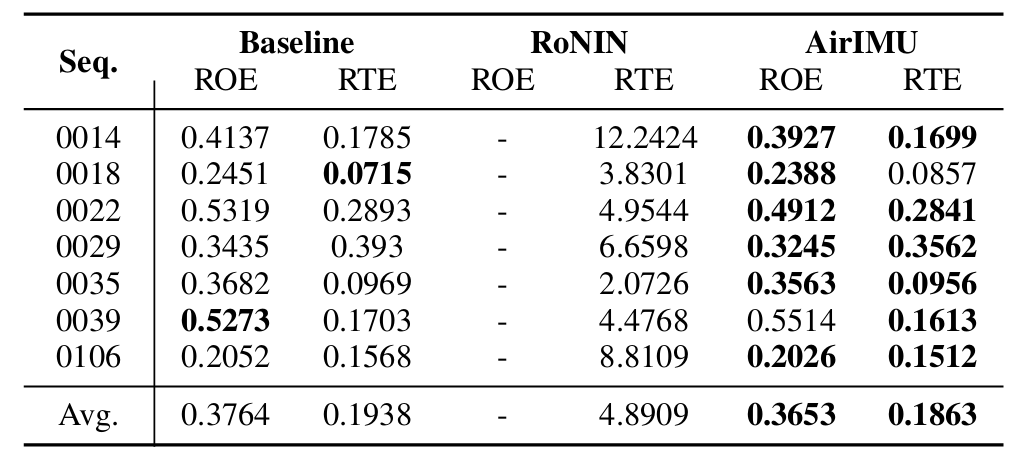
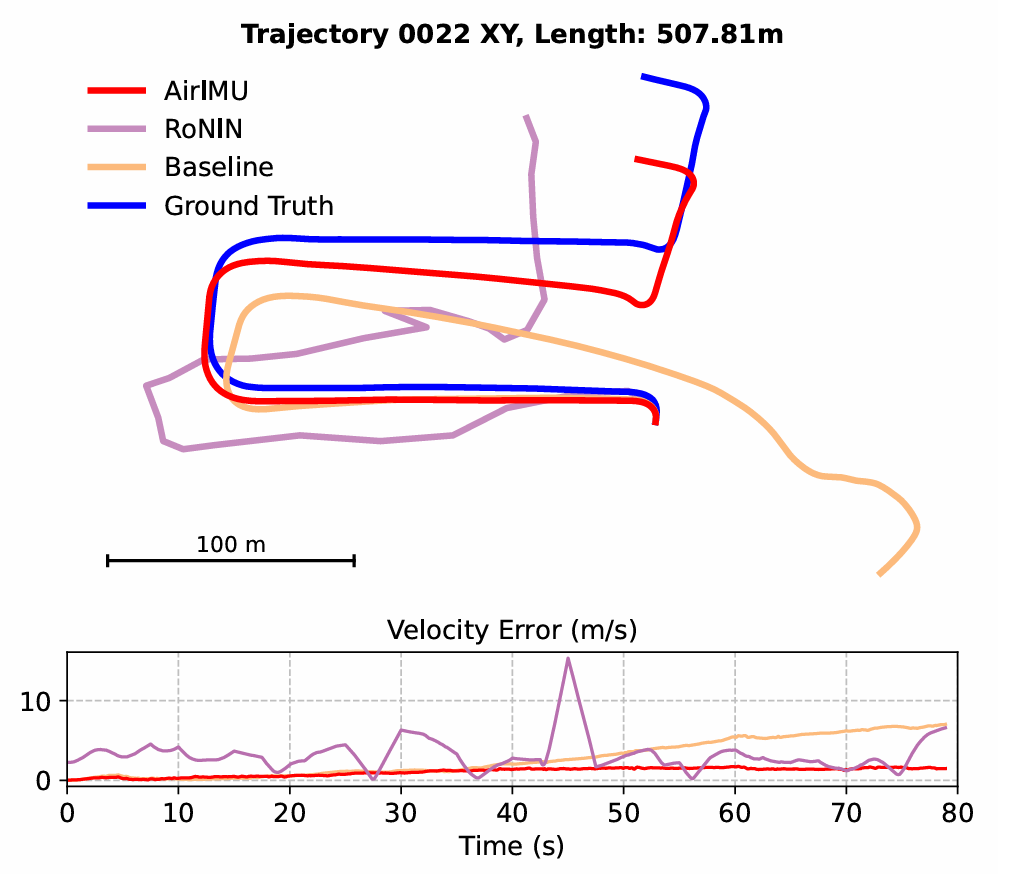
Subt-MRS
KITTI
BibTeX
@article{qiu2023airimu,
title={AirIMU: Learning Uncertainty Propagation for Inertial Odometry},
author={Yuheng Qiu and Chen Wang and Xunfei Zhou and Youjie Xia and Sebastian Scherer},
year={2023},
eprint={2310.04874},
archivePrefix={arXiv},
primaryClass={cs.RO}
}